Amaldi-Sraffa
5^A elettronica ed elettrotecnica
Anno scolastico 2020/2021
Braccio robotizzato comandato con
potenziometri e Arduino

Storia di Arduino:
Arduino nacque nei primi anni duemila dall’ ingengere elettronico Massimo Banzi, professore universitario dell’ Interaction Design Institute come progetto di ricerca.
La prima scheda venne messa sul mercato nel 2005 per aiutare gli studenti programmatori a poter creare prototipi che collegassero il mondo fisico a quello digitale.
Quell’anno fu rivoluzionario,il costo della sheda permetteva a chiunque di potersi approcciare al mondo dei microcontrollori,tant’è che successivamente ne fecero uso anche grandi industrie e ingeneri.
Successivamente nacquero tutorial di ogni genere,difficoltà ,grandezza ed utilità(ad esempio accendere un led o controllare un braccio robotizzato a proprio piacimento).
Sotto è rappresentata la scheda Arduino Mega 2560;
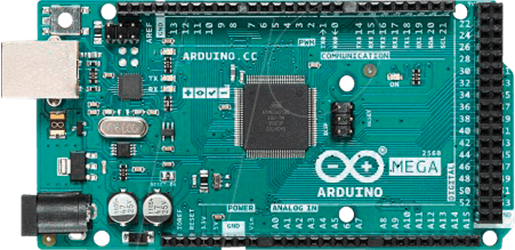
Le uniche differenze tra l’Arduino UNO e l’Arduino Mega 2560 R3 sono il numero di pin digitali e analogici.
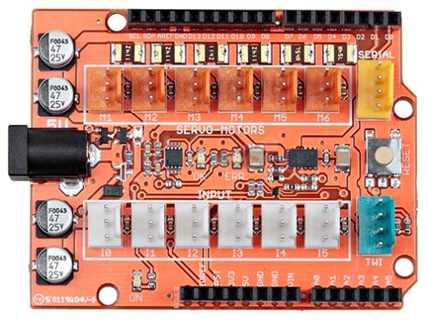
Explanation of the Arduino’s SHIELD:
For moving the robotized arm I used the SHIELD supplied by the Tinkerkit kit.
It allows me to connect all the motors in their respective inputs connected to PWM outputs equipped with a safety fuse.
Each connector allows to control analog devices in direct current with the particularity of modulating the power supplied
In fact, I used these outputs to be able to control every single motor of the robotized arm that allows me to move it as I want.
Circuito del Progetto:
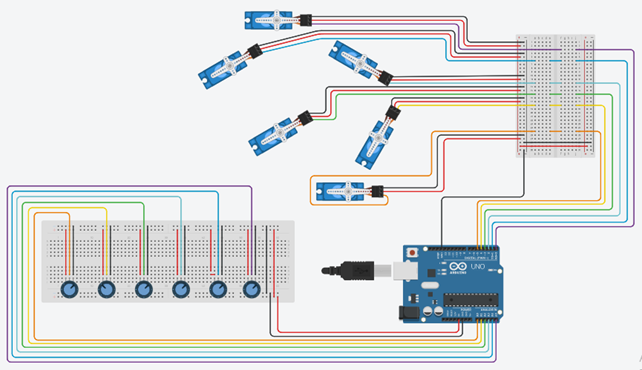
Lo schema del circuito rappresentato in figura è stato realizzato con un’applicazione chiamata TinkerCad. Questi rappresenta la base da dove è partito il progetto.
Descrizione Circuito del Progetto:
Le basette forate sono chiamate breadboard e consentono di montare e provare qualsiasi tipo di circuito. I collegamenti sono a file di cinque (la prima fila inizia dalla A e finisce alla E ,mentre la seconda inizia dalla F e finisce alla J) e tutte le colonne sono separate tra di loro.
I cavi sono tracciati in maniera da poter essere distinguibili facilmente,ogni cavo è associato ad una parte specifica del circuito. Gli unici cavi che hanno il colore specifico sono: il rosso(5V) usato per l’alimentazione e il nero utilizzato per la massa (GND).
La scheda verde è un Arduino MEGA 2560 R3,un microcontrollore che per funzionare necessita di un programma scritto in linguaggio di programmazione C++.
I “pomelli” neri invece sono dei potenziometri da 10kOhm, ossia dei resistori variabili che comandati manualmente permettono di controllare i servomotori (rappresentano ogni singolo motore) a piacimento muovendo il braccio in ogni direzione.
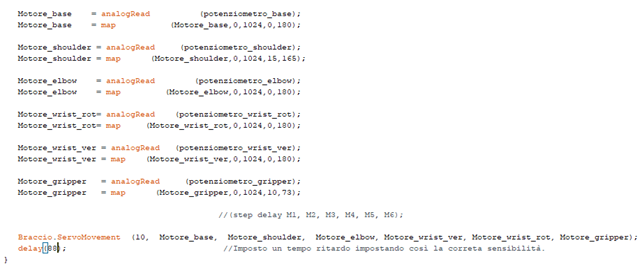
I potenziometri per poter muovere i motori hanno bisogno della funzione map, ossia un comando appartenente alla libreria “servo” che permette di leggere la tensione applicata sul potenziometro converetendola in gradi(i valori di tensione letti sono compresi tra 0 e 1023 e la conversione in gradi è compresa tra 0° a 180° ).
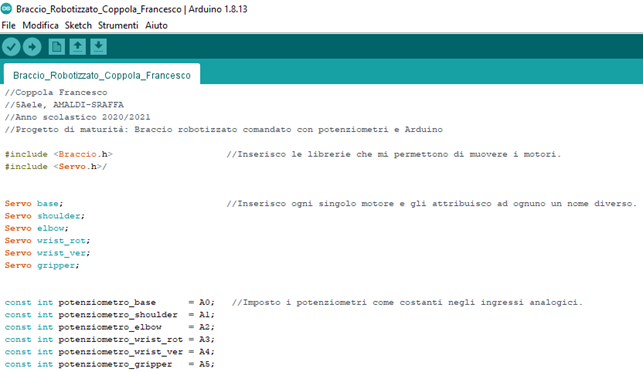
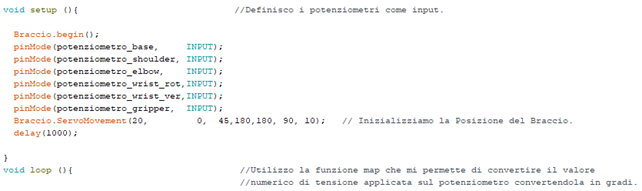
Sketch del programma:
Conclusioni:
Il progetto è stato realizzato grazie alla supervisione del professore Fabrizio Lucia e alla collaborazione dei miei compagni di team:Tommaso Corlito,Simone Dell’erba,Giovanni Iazzetta e Vittorio Trovato.