Il mio progetto consiste nel comandare un braccio robotico con Arduino da dei joystick.Partendo da dei prototipi da casa scambiando email con il Professor Lucia per poi finire con il collaudo a scuola.
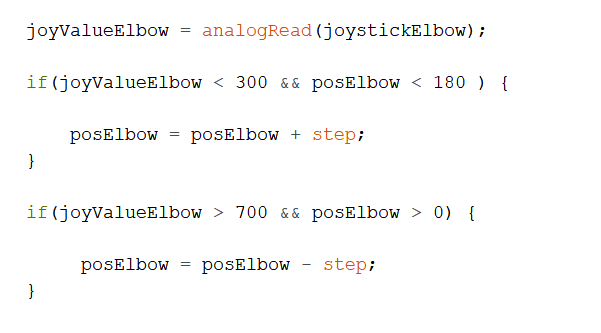
All’inizio pensavo semplicemente di tradurre i valori del joystick nei valori per il motore, ma ciò non mi permetteva di mantenere una posizione diversa da quella prestabilita, così ho optato per aumentare di un grado ogni dieci millisecondi ogni volta che muovevo il joystick, verso destra o verso sinistra. Muovendo verso destra sottraggo gradi, verso sinistra aggiungo gradi.
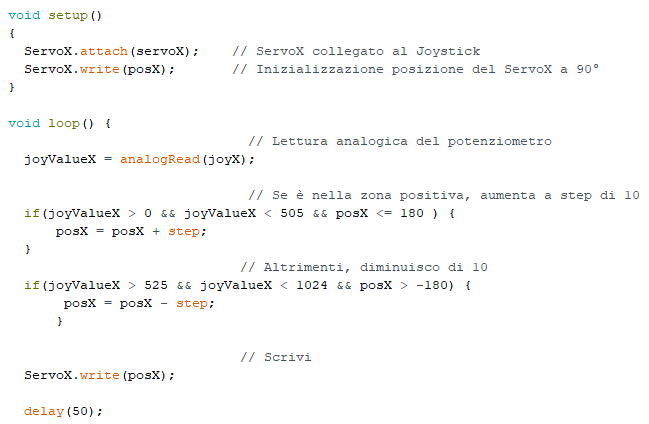
Nell’immagine sopra c’è il nucleo dell’algoritmo, tutto ciò dà vita ai vari motori ma usando un collegamento speciale tra i motori del braccio e Arduino questo algoritmo non va più bene.
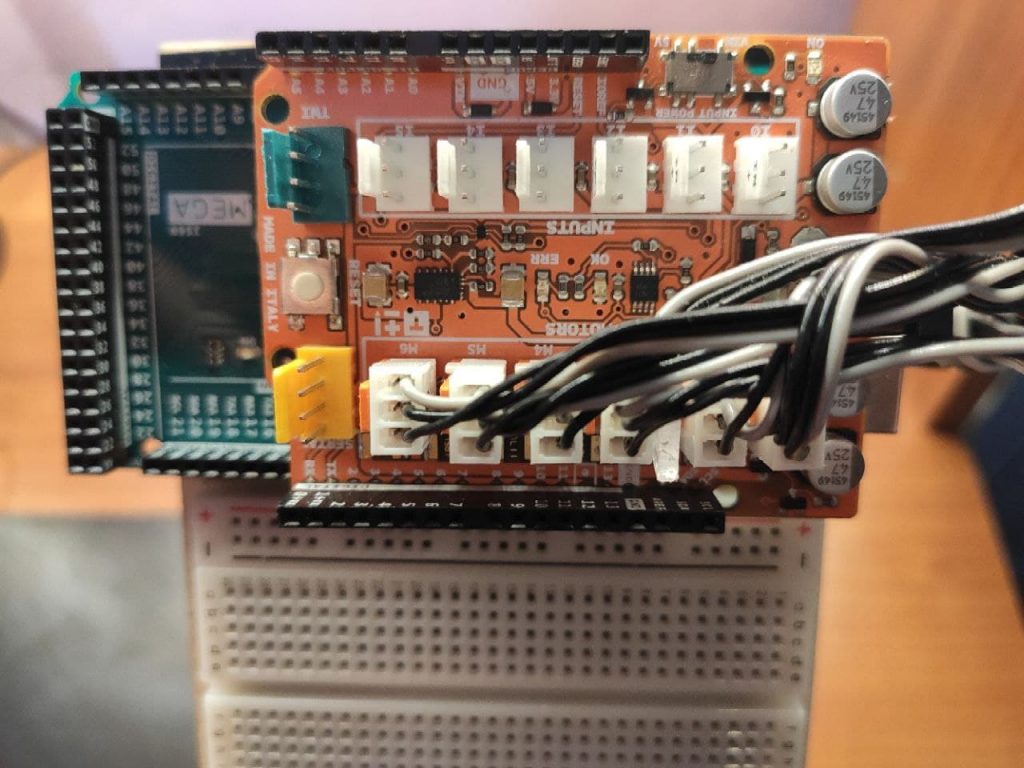
Questa shield è prodotta ad hoc per il braccio in questione e essendo un oggetto unico e particolare ha delle librerie da usare, ciò implica il fatto che il programma sia da riscrivere ma con la stessa idea.

Questo nuovo codice va a racchiudere funzioni appartenenti alle nuove librerie (Servo.h e Braccio.h), le funzioni mi permettono di facilitare il collegamento tra input (singolo asse del joystick) e output (uno dei sei motori).

Quest’ultima funzione é il collante tra input e output, ogni variabile (al di là del primo numero) rappresenta il valore nel tempo dei motori, in ordine da sinistra verso destra abbiamo i motori dal M1 all’M6.
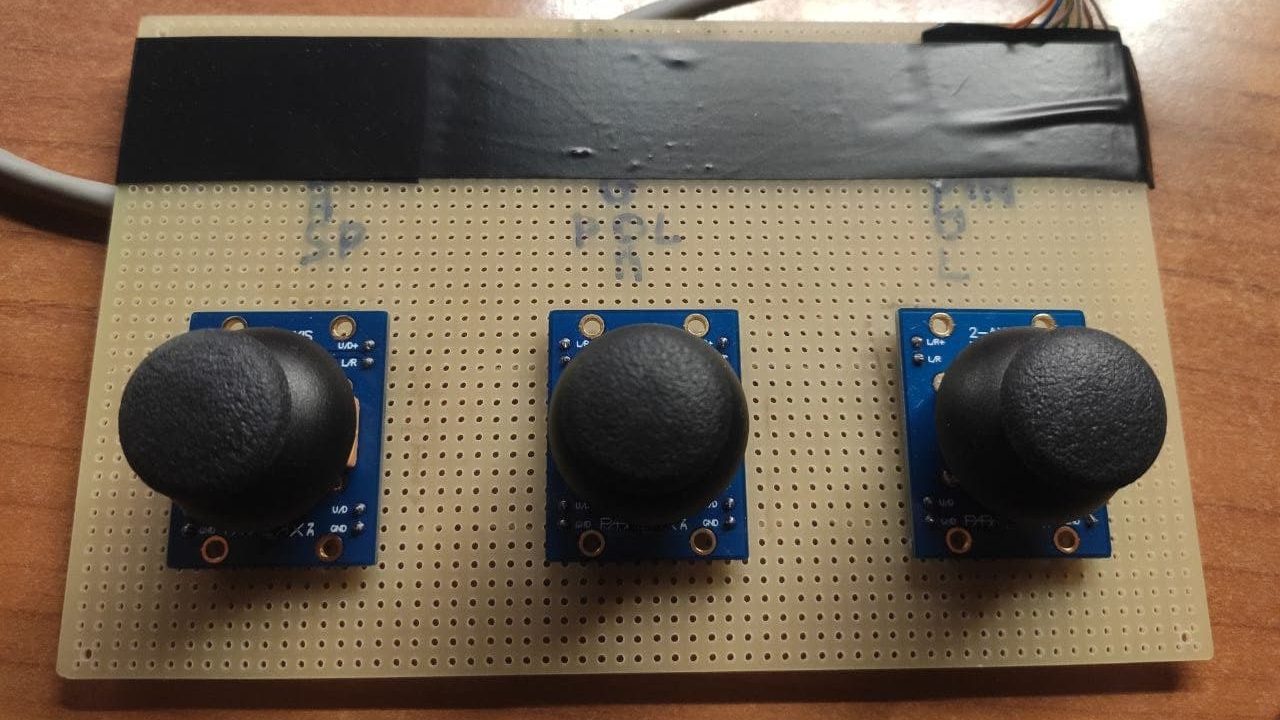
Per controllare il braccio utilizzo tre joystick, ogni joystick controlla due motori (un motore per asse); i joystick sono saldati ad una piastra millefori e poi racchiusi tra due strati di plexiglas opportunamente distanziati con viti e dadi.
Una volta realizzato il programma dovevamo pensare alla realizzazione della mostra finale, abbiamo avuto a disposizione la sala polivalente delle biblioteca grazie al Prof. Lucia e tre volte a settimana ci siamo ritrovati lì dalle 13 alle 18 dopo scuola e il Sabato mattina dalle 9 alle 12.

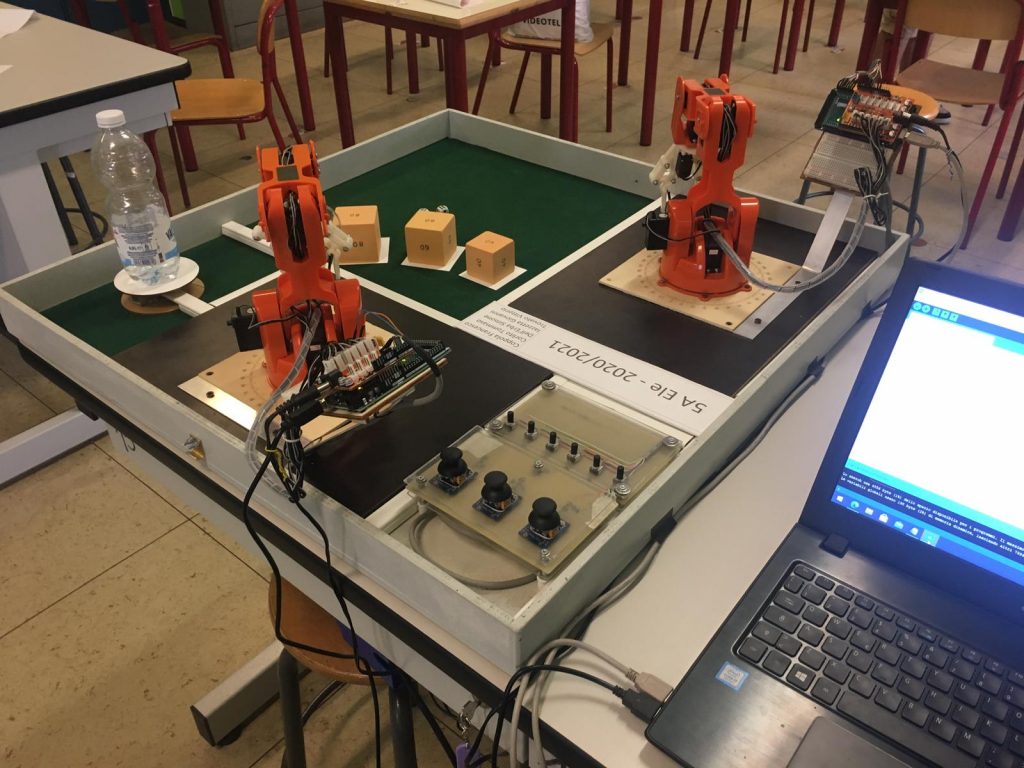
Dopo varie idee abbiamo deciso di utilizzare entrambe i bracci e di chiedere al padre di Dell’Erba di realizzare un ring per utilizzare i due bracci nello stesso spazio in modo da realizzare un progetto più uniforme e solido.

Dopo più di un mese la consegna era alle porte e la biblioteca non bastava più, così abbiamo optato per stabilirci a casa mia per le rifiniture e la conclusione del progetto, il telo verde applicato al ring, la disposizione dei bracci e gli ultimi aggiustamenti.

FILES: